开箱与首次使用
1 开箱与工作环境
注意:包装箱到位后,请先确认机器人包装完好无损,如有破损请及时与物流公司及所在地区的供应 商联系。拆封后,请根据物品清单对箱内实际物品进行核对。

表 2-2 myCobot机械臂【标准套】
| myCobot机械臂【标准套】所含产品内容 | -myCobot机械臂(型号myCobot 320 for Pi) -myCobot机械臂-产品画册 -myCobot机械臂-配套电源 -USB-Type C -跳线 -平面底座 |
|---|---|
请将机器人系统设置在符合如表所述条件的环境中,以便发挥、维持本机的性能并安全地进行使用。
表 2-3 工作环境与条件
| 工作环境 | 条件 |
|---|---|
| 温度 | 0°C~45°C |
| 相对湿度 | 20%~70% |
| 室内外要求 | 室内 |
| 其他环境要求 | - 避免阳光照射。 - 远离灰尘、油烟、盐分、铁屑等。 - 远离易燃性、腐蚀性液体与气体。 - 不得与水接触。 - 不传递冲击与振动等。 - 远离强电磁干扰源。 |
2 安装条件与要求
myCobot 机器人实际重量为3kg,考虑在使用过程中,随着机器人的运动,其重心会产生移动,所以需要将机器人固定在牢固机座上才可以正常使用。机座重量要求:固定式机座,或移动式机座。
机器人基座接口尺寸
基座固定孔位是固定机器人与其他机座或平面的接口,具体孔位尺寸如下图所示,为4个通孔直径为4.5mm的沉头孔,可以用M6的螺栓进行固定。
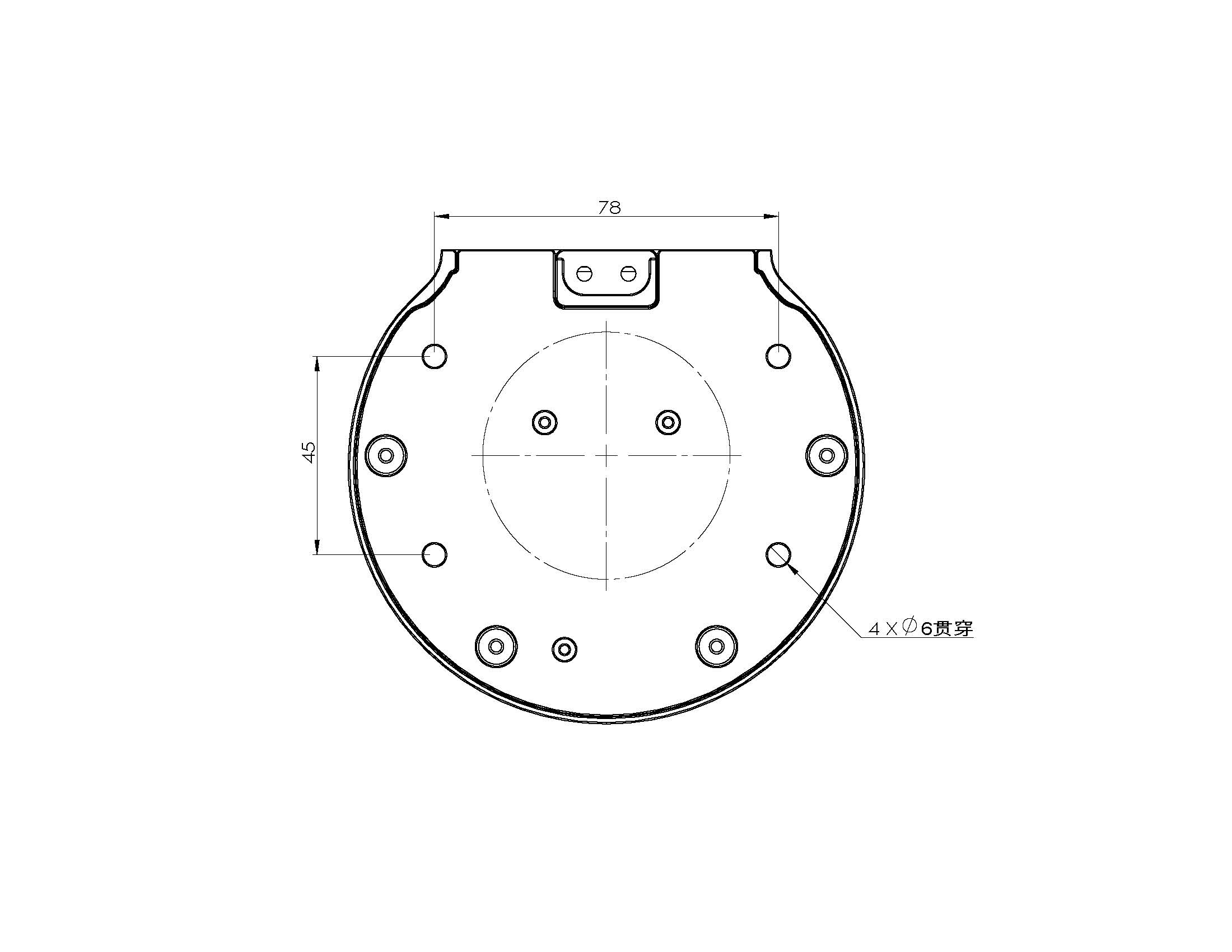
请确定固定底座上有对应螺纹孔位,再进行安装。
正式进行安装前,请确认:
待安装环境符合以上 2.2.2.3.1 节的要求。
安装位置不小于机器人工作范围,且留有足够大的安装、使用、维护、维修的空间。
将机座放置到合适位置。
安装相关工具已准备好,如螺丝、扳手等。
确认以上内容后,请将机器人搬运至机座安装台面上,调整机器人位置,将机器人基座固定孔位与机座安装台面上的孔位对准。对准孔位后,将螺丝对准孔位,拧紧即可。
注意:在机座安装台面上调整机器人位置时,请尽量避免在机座安装台面上直接推拉机器人,以免产生划痕。人工移动机器人时请尽量避免对机器人本体脆弱部分施加外力,以免造成机器人不必要的损伤。
更多安装细节可扫码观看视频:

3 机器人上电
操作前,请确认已阅读并确保已遵循 第一章 安全须知 的内容,确保操作安全。同时将电源适配器连接上机械臂,并将机械臂底座固定在桌子上。连接方式如图 3-1 所示。

图 3-1 电源接口位置
myCobot 必须使用外部电源进行供电,以提供足够的电量:
额定电压:24V
额定电流:9.2A
插头类型:R7B
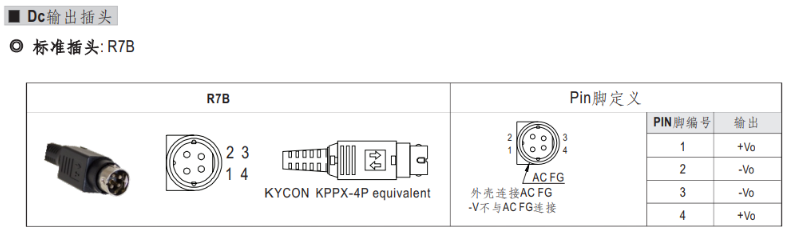
注意,不能仅仅使用插入M5Stack-basic的TypeC进行供电。使用官方适配的电源,以免对机械臂造成损害。
4 驱动安装
树莓派版本机械臂已内置软件驱动包,无需繁琐安装步骤,开机即可使用。
5 使用USB连接电脑
树莓派版本机械臂内置UBUNTU系统,无需连接其他电脑。
6 末端工具的使用
6.1 自适应夹爪
详细内容:5 自适应夹爪
自适应夹爪的安装视频待补充...
6.2 模块吸盘
详细内容:7 模块吸盘
模块吸盘的安装视频待补充...
6.3 电动夹爪
详细内容:8 电动夹爪
电动夹爪的安装视频待补充...
6.4 气动夹爪
详细内容:9 气动夹爪
气动夹爪的安装视频待补充...